
あけおめ&ことよろです。
前回までにロボットの頭の骨格をおおむね終え、首から胴体の開発に入っていく。
まず考えなくてはならないのはどこまで作るのか問題だ。
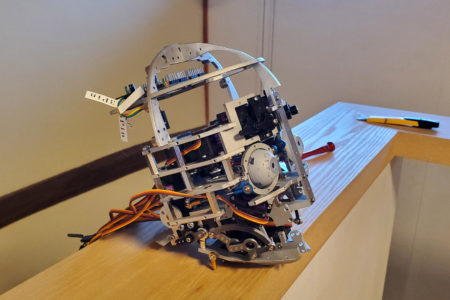
そもそも胴体を作るのは、頭を地面に置くと口が開かないからだった(↑の写真)。
首だけ作れば良いのか、はたまた全身を作り自由にスタスタ歩き回るのか。(二足歩行の制御は難しそうなのであまり現実的ではないけれど)
あまり多くを求めると完成が遠退く。腕を除いた上半身というのが妥当な線じゃなかろうか。
頭…というか顔はすごく複雑な動きをするしパーツを入れる空間は狭い。(人の頭の大きさを参考にするためネットで検索したら、モデルの菜々緒さんの顔が小さくて驚きという記事が出てきた。その値を参考にしたのでこのロボットは頭が小さい)
ここまでの頭に比べると、胴体は動く部分は少なく空間は広いのでスペース的には結構余裕があるかと思っていた。
しかし実際に部品の配置を考えると、胴体の動きは顔よりもパワフルなので大きなモーターが必要になる。思った以上に胴体も狭い。

市販の部品を使うとモーターの位置が5mm低くなってしまい、別の部品と干渉する。
たった5mmのスペースを確保するためだけにオリジナルの部品を削る。
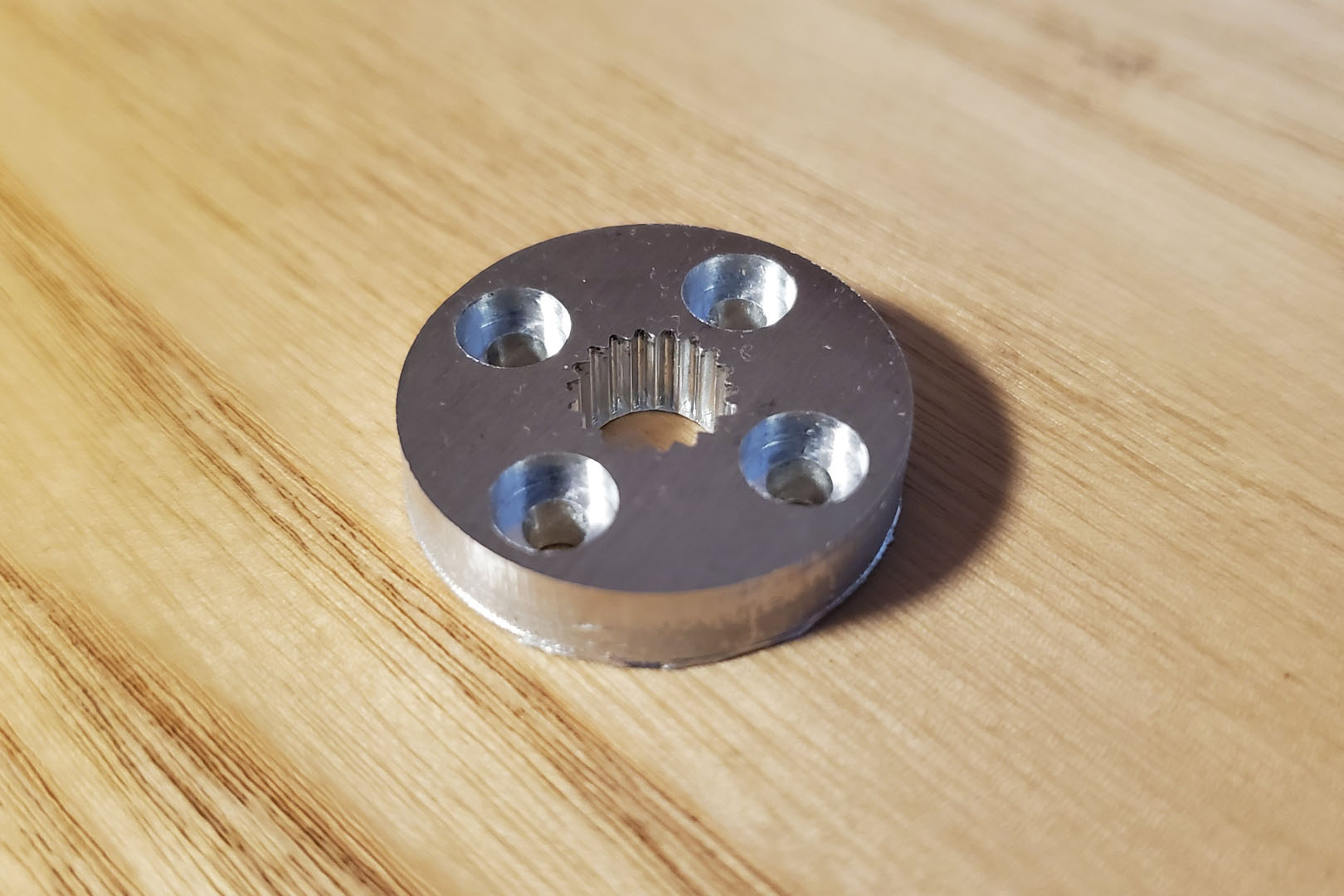
今回、完成した部品がこちら。
中央のギザギザがポイントだ。

モーターに取り付けてみた。モーターのギザギザとかっちり噛み合う。
噛み合わせるために100分の2ミリずつ試作品を作ってベストな噛み合わせを探った。
この部品を使えばモーターと軸受けを5mm近づけることができる。
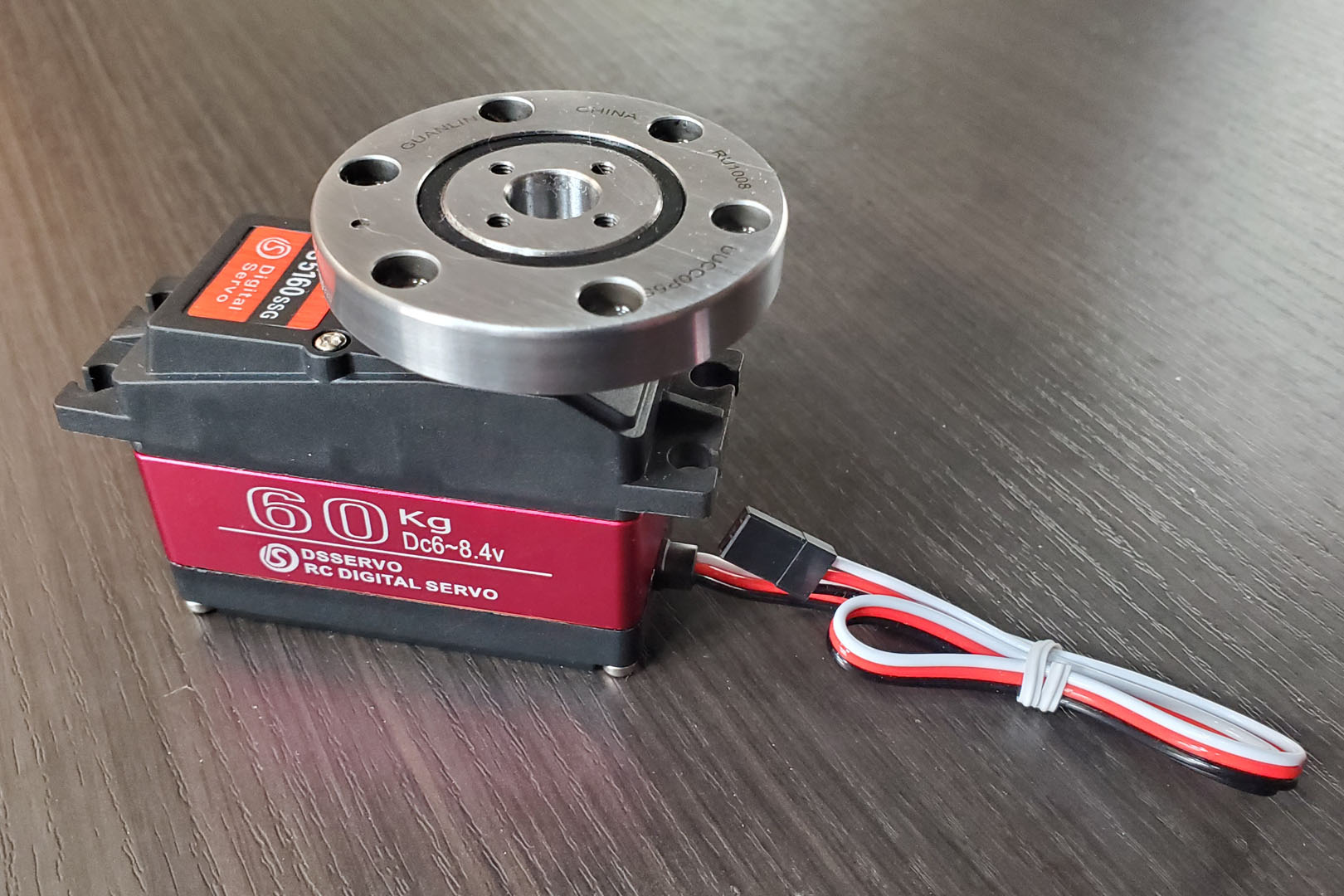
これが頭と首の重量を支える軸受けとモーターだ。
第6話へ続く